Myostat
Why Use an SR Joint?
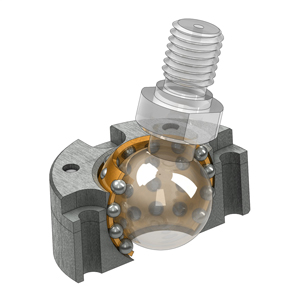
There are a variety of issues associated with incorporating multiple revolute joints into a mechanism. While multiple bearings provide two or three degrees of freedom the results are often bulky and complex. Myostat’s spherical rolling joint (SR joint) from Hephaist offers a unique solution for hexapods, Stewart platforms, parallel kinematic machines and photonics applications. With multiple degrees of freedom, which are essential for these mechanisms, an SR joint can replace traditional roller bearings and reduce the number of joints in a mechanical system.
In order to resolve issues with motion control and degrees of freedom, SR joints were developed with very low friction, a large range of motion, and virtually zero backlash. When compared to other joints (ball joints, universal joints, etc.) the SR joint offers higher precision in a smaller envelope and reduces the number of joints by 1/2 to 2/3; this assists in lowering the number of potential failure points and the accumulation of play.
The SR joint can replace a ball joint, and is suitable for use in a precision linkage, demanding mechanical structures, or in highly accurate positioning or measurement systems. They are optimal for parallel mechanisms—like the biped walking robot from Takanishi Laboratory—because of their high precision, high rigidity, and compactness. Check out Takanishi Laboratory's Walking Robot here.
To learn more about Myostat’s SR Joint motion control options check out our product page or contact us for more information.